Как сообщает пресс-служба бренда, в настоящее время Cadillac проводит испытания технологии Super Cruise для частичной автоматизации управления автомобилем. То есть это не совсем «беспилотник», а некий гибрид, позволяющий разгрузить водителя, когда тот выезжает на дороги с относительно постоянной скоростью движения. Проще говоря, на шоссе. Тем не менее, американцы утверждают, что их система способна тормозить, разгоняться и безопасно маневрировать даже в плотном потоке. Правда, все это касается движения в отдельно взятой полосе. То есть перестраиваться Super Cruise пока не умеет. Впрочем, эта функция, очевидно, ждать себя тоже не заставит.
Дело в том, что GM – один из пионеров в области создания подобных авто. Стоит напомнить, что компания еще в 2007 году руководила совместным с Университетом Карнеги-Меллон проектом по созданию Chevrolet Tahoe The Boss, который самостоятельно проехал 60 миль по городу, свободно интегрируясь в поток, проезжая перекрестки, обгоняя попутный транспорт и проезжая перекрестки. А в финале внедорожник исполнил парковку. В общем, определенный опыт в разработке «беспилотников» у инженеров компании все-таки имеется.
Мало того, отдельные компоненты этой Super Cruise уже внедрены в седаны XTC и ATS 2013 модельного года. Речь о пакете Driver Assist, куда, в частности, включены система автоматического торможения задних колес, работающий на любой скорости адаптивный круиз-контроль, аналог вольвовской BLIS, слежение за разметкой, система автоматической подготовки к столкновению, а также система предупреждения водителя о транспорте, движущемся в поперечном направлении (последняя, правда работает только при движении задним ходом). В общем, серьезных технических препятствий на пути реализации проекта, вроде бы нет.
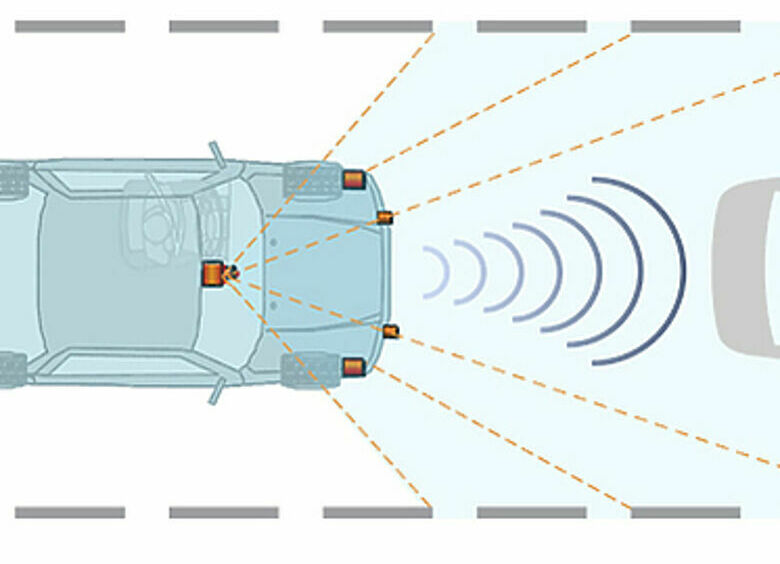
Тем не менее, существуют и вполне объективные факторы, серьезно замедляющие разработку. По словам Джона Кэппа, директора по электронным системам и инновациям в области активной безопасности GM, в основе частичной автоматизации управления автомобилем будет лежать функция контроля движения по полосе с помощью фронтальных камер для определения продольной дорожной разметки. А эти технологии, как известно сильно зависят от внешних факторов, таких как погода, видимость и... наличие разметки, как таковой.
Кроме того, для обнаружения поворотов и других особенностей дороги Super Cruise использует данные GPS. И это не менее серьезное препятствие, поскольку точное ориентирование на местности невозможно без детально прорисованных карт. Этот вопрос сейчас активно прорабатывает Google. Далеко не факт, что GM будет использовать их карты, но с другой стороны, альтернативы в общем-то и нет.
Google уже два года тестирует несколько собственных беспилотных машин. И они, как ни странно, работают (во всяком случае все аварии, в которые они попадали произошли по вине других водителей). Проблема в том, что позволяющая им передвигаться система крайне громоздка: комплекс лазерных дальномеров, радаров, видеокамер и сенсоров размещен и на крышах, и в салонах автомобилей. Кроме того, в машине постоянно находится сисадмин, отслеживающий работу «софта», так как любой программный сбой может привести к крайне тяжелым последствиям.
Иными словами, для создания гражданского и при этом совершенно безопасного «беспилотника» усилия придется объединять, используя опыт ни одного, ни двух и даже ни трех независимых разработчиков. В теории, автомобильная промышленность была готова к таком прорыву еще в 2008-м. Во время презентации системы City Safety представители Volvo дали четко понять, что марка готова сделать самостоятельно передвигающийся автомобиль. Однако все уперлось в обеспечение безопасности, а именно невозможность полноценной коммуникации между машинами. GPS, камеры и датчики рассматривались ими, как основной инструмент реализации идеи. Тем не менее, при парковке в ограниченном пространстве, а также при движении в плотном потоке, когда нельзя в полной мере предвидеть поведение и реакцию водителей соседних машин. В качестве возможного решения проблемы, шведы предлагали устанавливать в бамперы всех новых авто специальные датчики, которые связывались бы друг с другом, определяя расстояние между машинами с точностью до миллиметра, ориентируя, таким образом, и контраварийные, и парковочные системы.
В общем, технически автомобильный автопилот возможен уже сегодня, однако реализовать эту технологию без объединения сейчас вряд ли возможно. Но пойдут ли на это компании?